
Network Delay Time
Network Delay Time Problem
You are given a network of n directed nodes labeled from 1 to n, along with a list of directed edges, times, where times[i] = (ui, vi, ti):
- ui represents the source node (1 to n).
- vi represents the target node (1 to n).
- ti is the time it takes for a signal to travel from ui to vi (non-negative integer).
An integer k is also provided, representing the starting node for the signal.
Return the minimum time required for all n nodes to receive the signal. If it’s not possible for all nodes to receive the signal, return -1.
Examples related to Network Delay Time Problem
Example 1:
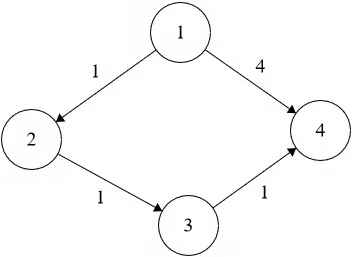
Output: 3
Example 2:
Output: -1
Constraints:
- 1 <= k <= n <= 100
- 1 <= times.length <= 1000
Hints to solve Network Delay Time
Recommended Time & Space Complexity
Aim for a solution with O(E log V) time and O(V + E) space, where E is the number of edges and V is the number of nodes.
Hint 1:
This problem requires finding the shortest time to reach all nodes from a single source node.
Heap-based algorithm like Dijkstra’s Algorithm is ideal for finding the shortest paths from a source to all other nodes.
Hint 2:
Using Dijkstra’s Algorithm, calculate the shortest paths from the source to all nodes.
To ensure all nodes are reached, the algorithm continues until the heap is empty.
This approach systematically updates the shortest distances as new edges are processed.
Hint 3:
Implement Dijkstra’s Algorithm with a Min-Heap. Build an adjacency list from the given edge list.
Initialize a dist[] array with infinity for all nodes, except the source node (dist[source] = 0).
Push the source node into the heap and start processing. After the heap is empty, check if all nodes were visited.
If any node remains unreachable, return -1. Otherwise, return the maximum value in dist[], representing the minimum time to reach all nodes.
Methods to Solve Network Delay Time Problem
There are mainly 5 approach to solve Network Delay Time problem:
- Depth First Search Method
- Floyd Warshall Algorithm
- Bellman Ford Algorithm
- Shortest Path Faster Algorithm
- Dijkstra’s Algorithm
1. Depth First Search Method
Traverse all possible paths from the source node using DFS. At each step, update the time taken to reach a node if a shorter path is found. This approach can be inefficient for large graphs.
- Time complexity: O(V∗E)
- Space complexity: O(V+E)
Where V is the number of vertices and E is the number of edges.
Code:
class Solution {
public:
int networkDelayTime(vector>& times, int n, int k) {
unordered_map>> adj;
for (auto& time : times) {
adj[time[0]].emplace_back(time[1], time[2]);
}
vector dist(n + 1, INT_MAX);
dfs(k, 0, adj, dist);
int res = *max_element(dist.begin() + 1, dist.end());
return res == INT_MAX ? -1 : res;
}
private:
void dfs(int node, int time,
unordered_map>>& adj,
vector& dist) {
if (time >= dist[node]) return;
dist[node] = time;
for (auto& [nei, w] : adj[node]) {
dfs(nei, time + w, adj, dist);
}
}
};
public class Solution {
public int networkDelayTime(int[][] times, int n, int k) {
Map> adj = new HashMap<>();
for (int[] time : times) {
adj.computeIfAbsent(time[0],
x -> new ArrayList<>()).add(new int[]{time[1], time[2]});
}
Map dist = new HashMap<>();
for (int i = 1; i <= n; i++) dist.put(i, Integer.MAX_VALUE);
dfs(k, 0, adj, dist);
int res = Collections.max(dist.values());
return res == Integer.MAX_VALUE ? -1 : res;
}
private void dfs(int node, int time,
Map> adj,
Map dist) {
if (time >= dist.get(node)) return;
dist.put(node, time);
if (!adj.containsKey(node)) return;
for (int[] edge : adj.get(node)) {
dfs(edge[0], time + edge[1], adj, dist);
}
}
}
class Solution:
def networkDelayTime(self, times: List[List[int]], n: int, k: int) -> int:
adj = defaultdict(list)
for u, v, w in times:
adj[u].append((v, w))
dist = {node: float("inf") for node in range(1, n + 1)}
def dfs(node, time):
if time >= dist[node]:
return
dist[node] = time
for nei, w in adj[node]:
dfs(nei, time + w)
dfs(k, 0)
res = max(dist.values())
return res if res < float('inf') else -1
class Solution {
/**
* @param {number[][]} times
* @param {number} n
* @param {number} k
* @return {number}
*/
networkDelayTime(times, n, k) {
const adj = {};
for (const [u, v, w] of times) {
if (!adj[u]) adj[u] = [];
adj[u].push([v, w]);
}
const dist = Array(n + 1).fill(Infinity);
const dfs = (node, time) => {
if (time >= dist[node]) return;
dist[node] = time;
if (!adj[node]) return;
for (const [nei, w] of adj[node]) {
dfs(nei, time + w);
}
}
dfs(k, 0);
const res = Math.max(...dist.slice(1));
return res === Infinity ? -1 : res;
}
}
2. Floyd Warshall Algorithm
- Dynamic programming algorithm that calculates the shortest paths between all pairs of nodes.
- It iteratively updates the shortest paths using each node as an intermediate, but it has a higher time complexity of O(n^3).
- Time complexity: O(V^3)
- Space complexity: O(V^2)
Where V is the number of vertices.
Code:
class Solution {
public:
int networkDelayTime(vector>& times, int n, int k) {
int inf = INT_MAX / 2;
vector> dist(n, vector(n, inf));
for (int i = 0; i < n; i++)
dist[i][i] = 0;
for (auto& time : times) {
int u = time[0] - 1, v = time[1] - 1, w = time[2];
dist[u][v] = w;
}
for (int mid = 0; mid < n; mid++)
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
dist[i][j] = min(dist[i][j],
dist[i][mid] + dist[mid][j]);
int res = *max_element(dist[k-1].begin(), dist[k-1].end());
return res == inf ? -1 : res;
}
};
public class Solution {
public int networkDelayTime(int[][] times, int n, int k) {
int inf = Integer.MAX_VALUE / 2;
int[][] dist = new int[n][n];
for (int i = 0; i < n; i++) {
Arrays.fill(dist[i], inf);
dist[i][i] = 0;
}
for (int[] time : times) {
int u = time[0] - 1, v = time[1] - 1, w = time[2];
dist[u][v] = w;
}
for (int mid = 0; mid < n; mid++)
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
dist[i][j] = Math.min(dist[i][j],
dist[i][mid] + dist[mid][j]);
int res = Arrays.stream(dist[k-1]).max().getAsInt();
return res == inf ? -1 : res;
}
}
class Solution:
def networkDelayTime(self, times: List[List[int]], n: int, k: int) -> int:
inf = float('inf')
dist = [[inf] * n for _ in range(n)]
for u, v, w in times:
dist[u-1][v-1] = w
for i in range(n):
dist[i][i] = 0
for mid in range(n):
for i in range(n):
for j in range(n):
dist[i][j] = min(dist[i][j], dist[i][mid] + dist[mid][j])
res = max(dist[k-1])
return res if res < inf else -1
class Solution {
/**
* @param {number[][]} times
* @param {number} n
* @param {number} k
* @return {number}
*/
networkDelayTime(times, n, k) {
const inf = Infinity;
const dist = Array.from({ length: n }, () =>
Array(n).fill(inf));
for (let i = 0; i < n; i++) {
dist[i][i] = 0;
}
for (const [u, v, w] of times) {
dist[u - 1][v - 1] = w;
}
for (let mid = 0; mid < n; mid++)
for (let i = 0; i < n; i++)
for (let j = 0; j < n; j++)
dist[i][j] = Math.min(dist[i][j],
dist[i][mid] + dist[mid][j]);
const res = Math.max(...dist[k - 1]);
return res === inf ? -1 : res;
}
}
3. Bellman Ford Algorithm
Iteratively relax all edges up to (n-1) times to find the shortest paths from the source to all other nodes.
It works well with negative edge weights but is slower, with O(VE) time complexity.
- Time complexity: O(V x E)
- Space complexity: O(V)
Where V is the number of vertices and E is the number of edges.
Code:
class Solution {
public:
int networkDelayTime(vector>& times, int n, int k) {
vector dist(n, INT_MAX);
dist[k - 1] = 0;
for (int i = 0; i < n - 1; ++i) {
for (const auto& time : times) {
int u = time[0] - 1, v = time[1] - 1, w = time[2];
if (dist[u] != INT_MAX && dist[u] + w < dist[v]) {
dist[v] = dist[u] + w;
}
}
}
int maxDist = *max_element(dist.begin(), dist.end());
return maxDist == INT_MAX ? -1 : maxDist;
}
};
public class Solution {
public int networkDelayTime(int[][] times, int n, int k) {
int[] dist = new int[n];
Arrays.fill(dist, Integer.MAX_VALUE);
dist[k - 1] = 0;
for (int i = 0; i < n - 1; i++) {
for (int[] time : times) {
int u = time[0] - 1, v = time[1] - 1, w = time[2];
if (dist[u] != Integer.MAX_VALUE && dist[u] + w < dist[v]) {
dist[v] = dist[u] + w;
}
}
}
int maxDist = Arrays.stream(dist).max().getAsInt();
return maxDist == Integer.MAX_VALUE ? -1 : maxDist;
}
}
class Solution:
def networkDelayTime(self, times: List[List[int]], n: int, k: int) -> int:
dist = [float('inf')] * n
dist[k - 1] = 0
for _ in range(n - 1):
for u, v, w in times:
if dist[u - 1] + w < dist[v - 1]:
dist[v - 1] = dist[u - 1] + w
max_dist = max(dist)
return max_dist if max_dist < float('inf') else -1
class Solution {
/**
* @param {number[][]} times
* @param {number} n
* @param {number} k
* @return {number}
*/
networkDelayTime(times, n, k) {
let dist = new Array(n).fill(Infinity);
dist[k - 1] = 0;
for (let i = 0; i < n - 1; i++) {
for (const [u, v, w] of times) {
if (dist[u - 1] + w < dist[v - 1]) {
dist[v - 1] = dist[u - 1] + w;
}
}
}
const maxDist = Math.max(...dist);
return maxDist === Infinity ? -1 : maxDist;
}
}
4. Shortest Path Faster Algorithm
An optimized version of the Bellman-Ford algorithm that uses a queue to relax edges more selectively, improving the average runtime in many cases.
- Time complexity: O(V+E) in average case, O(V∗E) in worst case.
- Space complexity: O(V + E)
Where V is the number of vertices and E is the number of edges.
Code:
class Solution {
public:
int networkDelayTime(vector>& times, int n, int k) {
unordered_map>> adj;
for (const auto& time : times) {
adj[time[0]].emplace_back(time[1], time[2]);
}
unordered_map dist;
for (int i = 1; i <= n; ++i) dist[i] = INT_MAX;
dist[k] = 0;
queue> q;
q.emplace(k, 0);
while (!q.empty()) {
auto [node, time] = q.front();
q.pop();
if (dist[node] < time) continue;
for (const auto& [nei, w] : adj[node]) {
if (time + w < dist[nei]) {
dist[nei] = time + w;
q.emplace(nei, time + w);
}
}
}
int res = 0;
for (const auto& [node, time] : dist) {
res = max(res, time);
}
return res == INT_MAX ? -1 : res;
}
};
public class Solution {
public int networkDelayTime(int[][] times, int n, int k) {
Map> adj = new HashMap<>();
for (int i = 1; i <= n; i++) adj.put(i, new ArrayList<>());
for (int[] time : times) {
adj.get(time[0]).add(new int[] {time[1], time[2]});
}
Map dist = new HashMap<>();
for (int i = 1; i <= n; i++) dist.put(i, Integer.MAX_VALUE);
dist.put(k, 0);
Queue q = new LinkedList<>();
q.offer(new int[] {k, 0});
while (!q.isEmpty()) {
int[] curr = q.poll();
int node = curr[0], time = curr[1];
if (dist.get(node) < time) {
continue;
}
for (int[] nei : adj.get(node)) {
int nextNode = nei[0], weight = nei[1];
if (time + weight < dist.get(nextNode)) {
dist.put(nextNode, time + weight);
q.offer(new int[] {nextNode, time + weight});
}
}
}
int res = Collections.max(dist.values());
return res == Integer.MAX_VALUE ? -1 : res;
}
}
class Solution:
def networkDelayTime(self, times, n, k):
adj = defaultdict(list)
for u, v, w in times:
adj[u].append((v, w))
dist = {node: float("inf") for node in range(1, n + 1)}
q = deque([(k, 0)])
dist[k] = 0
while q:
node, time = q.popleft()
if dist[node] < time:
continue
for nei, w in adj[node]:
if time + w < dist[nei]:
dist[nei] = time + w
q.append((nei, time + w))
res = max(dist.values())
return res if res < float('inf') else -1
class Solution {
/**
* @param {number[][]} times
* @param {number} n
* @param {number} k
* @return {number}
*/
networkDelayTime(times, n, k) {
const adj = {};
for (let i = 1; i <= n; i++) adj[i] = [];
for (const [u, v, w] of times) {
adj[u].push([v, w]);
}
const dist = {};
for (let i = 1; i <= n; i++) dist[i] = Infinity;
dist[k] = 0;
const q = new Queue([[k, 0]]);
while (!q.isEmpty()) {
const [node, time] = q.pop();
if (dist[node] < time) continue;
for (const [nei, w] of adj[node]) {
if (time + w < dist[nei]) {
dist[nei] = time + w;
q.push([nei, time + w]);
}
}
}
let res = Math.max(...Object.values(dist));
return res === Infinity ? -1 : res;
}
}
5. Dijkstra’s Algorithm
Greedy algorithm that uses a min-heap to find the shortest path from a source node to all other nodes efficiently.
It processes nodes in increasing order of distance, with O(E log V) time complexity.
- Time complexity: O(E log V)
- Space complexity: O(V + E)
Where V is the number of vertices and E is the number of edges.
Code:
class Solution {
public:
int networkDelayTime(vector>& times, int n, int k) {
unordered_map>> edges;
for (const auto& time : times) {
edges[time[0]].emplace_back(time[1], time[2]);
}
priority_queue, vector>, greater<>> minHeap;
minHeap.push({0, k});
set visited;
int t = 0;
while (!minHeap.empty()) {
auto curr = minHeap.top();
minHeap.pop();
int w1 = curr.first, n1 = curr.second;
if (visited.count(n1)) {
continue;
}
visited.insert(n1);
t = w1;
if (edges.count(n1)) {
for (const auto& next : edges[n1]) {
int n2 = next.first, w2 = next.second;
if (!visited.count(n2)) {
minHeap.push({w1 + w2, n2});
}
}
}
}
return visited.size() == n ? t : -1;
}
};
public class Solution {
public int networkDelayTime(int[][] times, int n, int k) {
Map> edges = new HashMap<>();
for (int[] time : times) {
edges.computeIfAbsent(time[0],
key -> new ArrayList<>()).add(new int[]{time[1], time[2]});
}
PriorityQueue minHeap = new PriorityQueue<>(
Comparator.comparingInt(a -> a[0]));
minHeap.offer(new int[]{0, k});
Set visited = new HashSet<>();
int t = 0;
while (!minHeap.isEmpty()) {
int[] curr = minHeap.poll();
int w1 = curr[0], n1 = curr[1];
if (visited.contains(n1)) {
continue;
}
visited.add(n1);
t = w1;
if (edges.containsKey(n1)) {
for (int[] next : edges.get(n1)) {
int n2 = next[0], w2 = next[1];
if (!visited.contains(n2)) {
minHeap.offer(new int[]{w1 + w2, n2});
}
}
}
}
return visited.size() == n ? t : -1;
}
}
class Solution:
def networkDelayTime(self, times: List[List[int]], n: int, k: int) -> int:
edges = collections.defaultdict(list)
for u, v, w in times:
edges[u].append((v, w))
minHeap = [(0, k)]
visit = set()
t = 0
while minHeap:
w1, n1 = heapq.heappop(minHeap)
if n1 in visit:
continue
visit.add(n1)
t = w1
for n2, w2 in edges[n1]:
if n2 not in visit:
heapq.heappush(minHeap, (w1 + w2, n2))
return t if len(visit) == n else -1
/**
* const { MinPriorityQueue } = require('@datastructures-js/priority-queue');
*/
class Solution {
/**
* @param {number[][]} times
* @param {number} n
* @param {number} k
* @return {number}
*/
networkDelayTime(times, n, k) {
const edges = new Map();
for (let i = 1; i <= n; i++) {
edges.set(i, []);
}
for (const [u, v, w] of times) {
edges.get(u).push([v, w]);
}
const minHeap = new MinPriorityQueue(entry => entry[0]);
minHeap.enqueue([0, k]);
const visit = new Set();
let t = 0;
while (!minHeap.isEmpty()) {
const [w1, n1] = minHeap.dequeue();
if (visit.has(n1)) continue;
visit.add(n1);
t = w1;
for (const [n2, w2] of edges.get(n1)) {
if (!visit.has(n2)) {
minHeap.enqueue([w1 + w2, n2]);
}
}
}
return visit.size === n ? t : -1;
}
}

